Ю. Лохматов
ПУТС на подводных лодках,
во Второй мировой
войне.
На подводных
лодках в 1939-1945 гг. основным
оружием против надводных
кораблей, транспортов были торпеды. В
зависимости от водоизмещения подводные
лодки имели 2 - 10 торпедных
аппарата. Большие крейсерские
подлодки США типа «Wahoo» водоизмещением 1525/2415 тонн, имели скорость
18/8 узлов. В Японии строили
подводные лодки,
несшие по 3 гидросамолета, водоизмещением 5223/6560 тонн. Перечислять
все подводные лодки не имеет
смысла интересующие, могут найти их данные
на сайтах. Имея радиолокатор,
щумопеленгаторную станцию командиры
подводных лодок США в
1944 г. стали осваивать метод
бесперископных торпедных атак. Прибор управления
торпедной стрельбы (ПУТС) рассчитывал
угол упреждения
исходя, из скорости
надводного корабля его дальности,
и курса
по отношению к подводной
лодке. Оптика –
электромеханическое устройство по данным
определяла угол упреждения,
который разворачивал торпеду к кораблю. Рассчитывая курс
торпеды, определяя дальность до цели
командир, перемещая
нить окуляра перископа,
с кормы на форштевень определял длину
корпуса, пеленг цели. Для
определения угла упреждения
ПУТС вычислял угол по «торпедному треугольнику».
Линия,
соединяющая подводную лодку и надводный
корабль на карте
штурмана в момент
пуска торпеды - эта одна
сторона торпедного треугольника.
Расстояние, пройденное торпедой
рассчитанное ПУТС до
атакующего корабля - эта вторая
сторона. Третья сторона
- эта путь,
который пройдет корабль
противника с момента
пуска до взрыва
торпеды при попадании
её в корпус корабля - цели. На
подводной лодке торпедные
аппараты, расположенные
в носовой части и в корме. ПУТС рассчитывал (
угол упреждения ) и заносил данные
в торпеды. Гироскоп с учетом угла
поворачивает торпеду, к цели кораблю. Рассчитанный
угол упреждения, переложив
рули торпед, будет держать их
в таком положении
до тех пор, пока
торпеда не повернется на заданный курс
к цели. Наблюдая цель
в перископе, командир
определял курсовой угол цели ( bк ) по
перископному лимбу. Курсовой
угол заносился в
ПУТС , который отсчитывался
от положения носовых торпедных
аппаратов – эта перископный угол
на цель «пеленг». Угол определялся по грот
- мачте, форштевню надводного
корабля направленности торпедных аппаратов к цели. Сближаясь с
подводной лодкой, корабль, идет
своим курсом со своей скоростью
и проходит расстояние
(В С) = Vк * t .
ПУТС рассчитывает
прицеливание, угол упреждения (sin
а
= Vк * t/Vт * t * sin bк). Скорость цели
корабля ( Vк) определял
командир, скорость
торпеды (Vт) устанавливал оператор, занося
данные в ПУТС,
курсовой угол цели ( bк ) из прокладки курса вводит оператор с карты штурмана,
размеры корпуса уточняются по «справочнику опознавания
кораблей противника». Стрельба
с подводной лодки с неподвижных торпедных аппаратов требует
ввода угла (а) в механизм маневрирования управляемый
рулями торпеды .
18.11.44
г. от командира стаи,
в неё входила
3 подводные лодки США «Спейдфиш, Санфиш,
Пето», поступило донесение
в штаб подводников
в Пирл – Харбор о
потоплении в Желтом
море авианосца. С
дистанции 20 кабельтовых в
22.59 «Спейдфиш» выпустили
6 торпед под
углом 65 градусов в
авианосец, идущий со скоростью
14 уз. Развернувшись «Спейдфиш»
из кормовых аппаратов
произвела залп по танкеру с
дистанции 2700 метров под
углом 132 градуса. Торпеды, попали в корму авианосца объятый
пламенем, он накренился на
правый борт, самолеты
стали падать с
полётной палубы. Конвойный
авианосец «Синьё» водоизмещением в 20 916
тонн, имеющий радар,
50 зенитных 25 – мм
автоматов затонул. Рассчитать
и внести данные
в торпеды командиру помог ПУТС.
 | 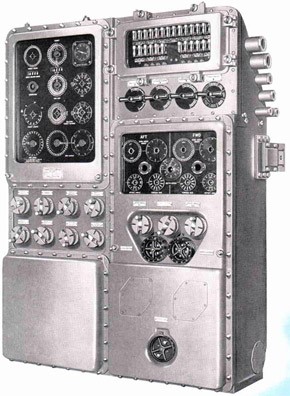 | 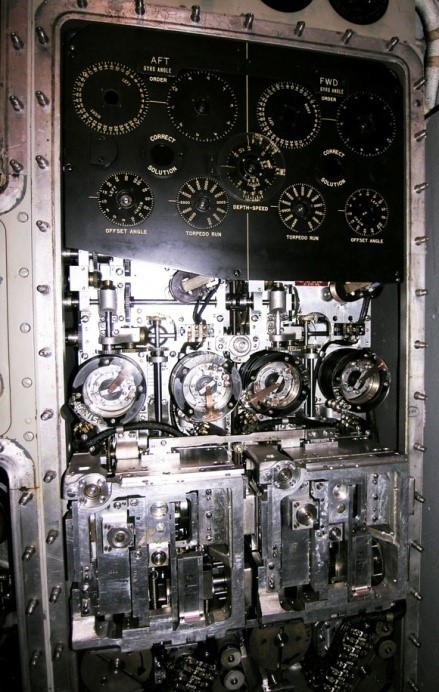 |
Командир подводной лодкой «SS-311» Джозеф Инрайт подробно описывает потопление японского авианосца «Синано» с помощью ПУТС «TDC Mk-III». Такой аналоговый ПУТС для наведения торпед стоял на американских субмаринах.
Панель
с расположенными
циферблатами, переключателями, рукоятками
настроек. «TDC Mk-III» показана
на фотографии. ПУТС рассчитывала
угол
упреждения с учетом нахождения
цели, скорости надводного
корабля, дальности до цели, времени
встречи торпеды с целью положению
субмарины и её
скорости. Джозеф Инрайт получил
сообщение о корабле
от оператора с
экрана радара в 20.
40. По радиолокационному радару
определили курсовой угол, скорость цели. Операторы засекли
цель на расстоянии 24 700 ярдов, по
пеленгу 28 градусов. Инрайт
увидел низкую
выпуклость на горизонте двигающеюся навстречу
подводной лодке. В ПУТС
внесли дальность до
цели, скорость. Курс,
скорость подводной лодки, по
отношению к цели, считанный с гирокомпаса
и гидродинамического лага ввели
в «TDC
Mk-III» с учетом времени.
Ввели данные
о скорости торпеды Mk-14. Расстояние
сокращалось, подводная лодка со скоростью
18 узлов по
курсу 208 градусов
сближалась с целью.
Штурманы прокладывали курс, подводной
лодки и цели,
сверяя данные с ПУТС. При помощи стрелки на градусном
лимбе выставлялся рассчитанный
угол упреждения ( а ).
Вторая стрелка на
панели ПУТС указывала
гироскопический угол, передающийся
на гироскопы торпед
в торпедных аппаратах. Стержни проходящего
через торпедный аппарат
соединяли торпеды, данные
вводились в механизм поворота
автоматически с учетом
дальности и курса цели.
Противолодочный зигзаг сблизил авианосец,
которым командовал кэптен
Абу Тосио до 7 кабельтовых
с подводной лодкой.
Из допроса, оставшиеся
в живых рассказали, капитан
Абу Тосиво был
уверен, авианосец атакуют
несколько лодок и
он запретил включать
гидролокаторы эсминцам охранения.
Наблюдая в ночном
перископе за курсовым углом авианосца, он
составил 180 градусов, и
смещался к 170, Йнрайд вывел
субмарину вперед авианосца,
имея идеальную
возможность для пуска
торпед. Авианосец, идя
перпендикулярна, к подлодке
сблизился на 3 200 метров.
Эсминец охранения прошел
вблизи подводной лодки, заставил
погрузиться под воду на глубину
62 фута. В
поднятом перископе курсовой
угол сильно увеличивался
и находился на пределе
авианосец менял курс. Выпустили
6
торпед с расстояния
1 260 метров с глубиной хода
10 футов, с гироскопическим углом
поворота торпед вправо.
В авианосец в 03.17,
через 57 секунд попали
4 торпеды, из них 3
в цитадель. Веерообразные
попадания 1 торпеды пришлось в правый борт
по пустой цистерне бензина, вода
ворвалась в цробоину, 2
торпеда повредила редуктор гребного вала, и затопила
машинное отделение. 3 вывела из
строя 3 котельное
отделение, повредила переборку
1 котельной, напор
воды выдавил переборку
7 котельной. Последняя
4 попавшая в
корпус торпеда ударила по
компрессорному отсеку, затопила
погреб с зенитными
снарядами. В экипаже
авианосца были большие
жертвы. «Синано», получил
крен, несмотря на
перекачку воды на
левый борт 29 ноября
1944 г. затонул в
65 милях от побережья
Японии. Авианосец имел
ход и управлялся,
незавершенность постройки, отсутствие
помп для откачки
воды, привели к
гибели самого большого
авианосца водоизмещением
60 000 т, «Синано» заложили на судоверфи
Йокосука и через четыре с
половиной года сдали
ВМФ. Авианосец совершал
переход во Внутреннее
море ночью. Несомненно, в
попадание торпед в корпус
авианосца, потоплении его роль командира
субмарины, аналогового компьютера « TDC Mk-III», лейтенанта
Бантанга вводившего данные
в торпедный автомат
стрельбы. ПУТС огромна. Производя тригонометрические вычисления, выдавал
курс торпедам с помощью механических
дисков вращающихся от
сервомоторов непрерывно автоматически
вводились в торпеды
данные поступаемые с перископа,
радара, гидролокатора, гирокомпаса,
гидродинамического лага. Штурман
на карте прокладывал курс
с учетом нахождения
цели курса корабля
подводной
лодки, по отношению к авианосцу.
19 декабря
1944 г. авианосец «Унрю»
в сопровождении трех
эсминцев был обнаружен «SS – 395». Этот день запомнился коммандеру
Мак Грегору, 16.27 в
перископе оказался корпус большого
авианосца. Гидроакустики авианосца
прослушивали отраженные
сигналы по курсу. Противолодочный зигзаг
вывел авианосец на «Redfish», с
расстояние 1 344 метра 4 торпед
устремились в 16.35
к «Унри». Акустики
авианосца обнаружили вражескую
подлодку по правому
борту, сигнальщики доложили
о торпедах. Авианосец
увернулся от 3 торпед ,
одна попала
в корпус перед надстройкой.
Взрыв разнес электроэнергетический пост,
вода затопила котельные
отделения 1 и 2. Пожар в
ангаре авианосце мог
привести к детонации,
30 самолетов – снарядов «Ока». От
сотрясения и повреждения
пар стравило, турбины
остановились. С креном
3 градуса авианосец
потерял ход, в нескольких
сотнях метров от «SS – 395». Перезарядив
кормовой торпедный аппарат в 16.50 с дистанции
один километр, выпустили торпеду
в авианосец. Торпеда
попала в корпус в районе
носового самолётоподъемника. Детонация
40 тонн взрывчатки
и 100 тонн авиабензина разорвали
корпус. Капитан Кониси
приказал экипажу покинуть
авианосец. В 16.57
накренившись на правый
борт «Унрю» ушел
под воду. Эсминцы обнаружили
гидроакустикой подводную лодку и
серьезно повредили «Redfish». SS - 395 больше
не выходила в
боевые походы до
окончания войны находилось
в ремонте. Во
всех боевых описанных
действиях в потоплении
авианосцев навыки и
выучка экипажей подводных лодок, ПУТС
помогали топить японские авианосцы.
До сложных
электромеханических
аналоговых вычислителей на
подводных лодках существовали
правила минной стрельбы.
Благодаря таблице С.А. Кукеля в
русском флоте при
стрельбе с вводом данных
попадание торпед в цель улучшились.
В
апреле 1913 г. комиссия
представила « Правила минной
службы» для подводных
лодок». Они дорабатывались, появились на
всех подводных лодках.
Классический «торпедный треугольник»,
прицеливания с
дистанций (2 - 6 кабельтовых) допускал
ошибку в определении, влиял
на точность стрельбы.
Многие командиры понимали,
стреляя залпом можно
поразить цель с
большой вероятностью за
счет рассеивания торпед.
В США при расчетах
использовалась круглая линейка
с 3 встроенными вращающимися вставленными
линейками. С её
помощью вычисляли курс
торпеды к цели с
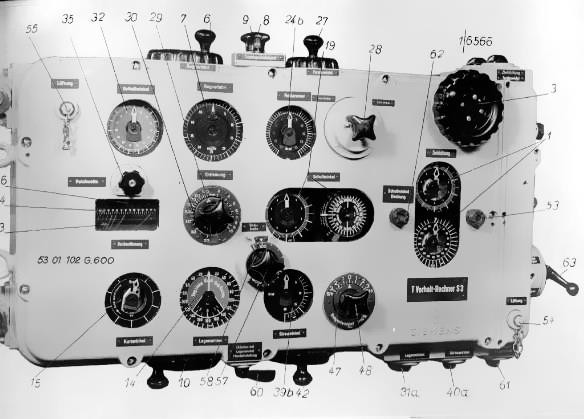
середине 30-х. В немецком
флоте существовал механический
вычислитель , он использовался в Первой мировой
войне в него
ввели электромеханическую часть в 1942 г. Лицевая панель
такого счетно – решающего устройства
«T. Vh. Re.S.2» на фото. ПУТС позволял
последовательно
производить стрельбы по
нескольким целям в
конвое. Простейшие способы
стрельбы описаны в наставлении и интересующие могут ознакомиться
с минной стрельбой. В
книге « Рыцари глубин»
Э.А Ковалев посвятил
этому треть страниц ,
подробно описывая способы
стрельбы проверенный в учебных
стрельбах перед Первой
мировой войной. Круглая
логарифмическая линейка описано
на сайте Navy Documents – Historic Naval Ships Association., с математическими расчетами,
схемами атаки надводных
кораблей. По данным
вычисленным с её
помощью определялся курс торпеды к цели во
время пуска. Требовались
приборы для точной
стрельбы и они были
на подводных лодках
во Второй мировой
войне. Сложные в
изготовлении, имея большие
габариты и вес, надежные в
работе электронно – механические ПУТС вычисляли
угол встречи с
надводным кораблем и торпедой с подлодки.
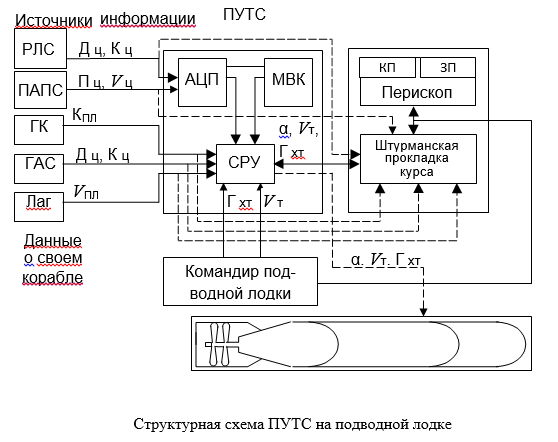
Простейшая функциональная схема
ПУТС приведена на рисунке.
В 1944 г. на подлодки
США стал поступать
« TDC Mk-IV» данные
о пеленге заносились
автоматически с
гидролокатора в подводном
положении. Стали учитывать
запаздывание при залпе несколькими торпедами.
Следящая система вырабатывала
данные и вводила изменения в торпеды
автоматически. Дистанция стрельбы
торпед, её скорость,
угол были решающими
для точного наведения
торпед. Во Второй
мировой войне на одну
подводную лодку США пришлось
15,5 тыс. рег.
т, на одну
погибшую 98 тыс. рег.
т.
 |  |
В Японии и Италии подводные лодки доставляли к стоянкам кораблей сверхмалые карликовые подводные лодки. Японская подлодка водоизмещением 46 тонн с надводной дальностью 80 и подводной 20 миль использовалась в начале войны имея два торпедных аппарата. Экипаж лодки командир и моторист доставлялись к вражеской базе на большой подводной лодке. О «кайтэне», японских моряках управляющих этими носителями написаны мемуары интересующие могут ознакомиться, прочитав о них. Итальянцы построили специальную лодку для доставки подводных пловцов диверсантов с взрывчаткой. Великобритания, построив несколько сверхмалых лодок, пыталось вывести из строя линкор «Тирпиц». Им не удалось создать ПУТС с техническими данными как у германских и американских подводных лодок, поставить на торпеды прибор маневрирования. К подводным лодкам британские адмиралы относились пренебрежительно, полагаясь на флот из линкоров, в окружении авианосцев, эсминцев и крейсеров. Отстаивая на морских конференциях квоты по тоннажу они стремились к равновесию в военно - морских силах с учетом расходов на ВМФ заинтересованных сторон. На подводных лодках ВМФ СССР такие устройства отсутствовали из-за технической отсталости, торпеды запускали как во времена Первой мировой войны используя наставления и инструкции. Специалисты морского штаба СССР намечали построить 201 подводную лодку к 1942 г. К началу Великой Отечественной войны во флоте СССР находилось 206 подводных лодок.
За 100
- летний период построено
около 5150 дизель – электрических и 460
атомных подводных лодок.
Имеющие обтекаемые обводы, скорость
20 – 40 узлов в подводном положении, в
надводном ниже на 8 -20 узлов
подводная лодка имеет
преимущества перед противником.
Прослушивая гидроакустической аппаратурой на
десятки миль водную
среду подводная лодка засекает цель. На скорости
подлодка, уйдет на большую
глубину, выйдет из
зоны поражения после пуска торпед. Торпедная
атомная подлодка под
термическими слоями на
большой глубине атакует противника
торпедами с системой
самонаведения. Самолёт наведения через спутники ретрансляторы
наводят её на противника. В середине 50-х.
на подводных лодках
СССР появился ПУТС «Ленинград». Его можно увидеть в
Балаклаве в музее Черноморского ВМФ. Комплекс управления торпедным
оружием современных подлодок, это
сложнейшая аппаратура, имеющая несколько вычислительных процессоров,
блоки контроля данных
отслеживающий и
сопровождающий несколько целей. Комплекс распределяет цели,
управляя стрельбой в
различных комбинациях, оценивает
угрозу со стороны
противника.

Все операции отображаются на дисплеях, с использованием локальной сети. Автоматическая система боевого управления (АСБУ) наводит крылатые ракеты и программируемые универсальные торпеды на цели. Работая в пассивном и активном режимах, обеспечивает классификацию и сопровождение нескольких целей, оценивая угрозу со стороны противника система «обследует» на десятки миль гидроакустическими средствами поверхность и глубину моря. Без АСБУ немыслимо управление оружием подводной лодке, их постоянно модернизируют. Выполненные на интегральной микроэлектронике АСБУ определяет параметры цели её маневр, фиксирует всё в памяти ЭВМ.